|
The Kālacakra world model is not mechanical |
|
|
|
The Kālacakra world model is not mechanical |
|
|
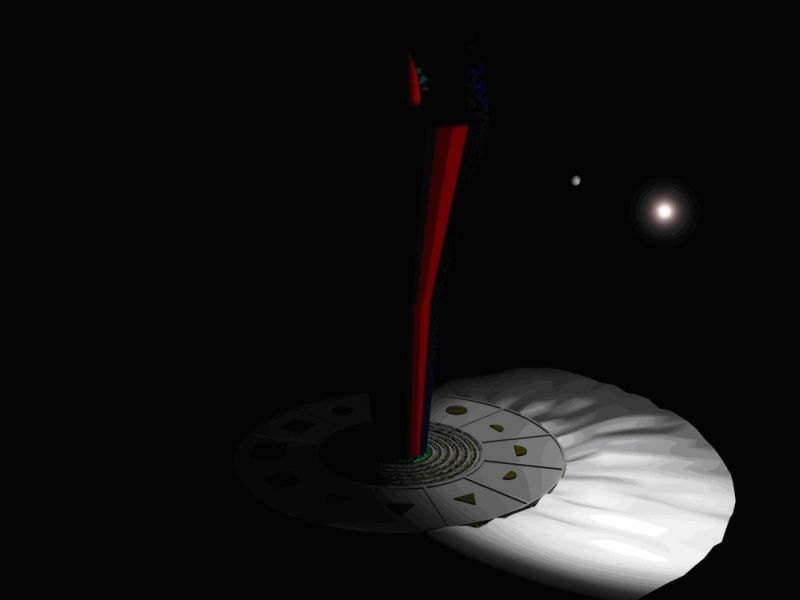
The following is a paper prepared for presentation at the Central Institute of Higher Tibetan Studies in Sarnath, India. To view or download a pdf version of this, please click here. The short version of this paper would read: the Kālacakra system possesses a model of the world system, but it is qualitative, and not a mechanical model that could be used to derive calculations of solar, lunar and planetary positions. The Kālacakra system in fact lacks such a model, and the calculations used stem from older models that are not now preserved in the Kālacakra literature. I should describe here first just what I mean by a mechanical model in this context. In modern physics, the model could be called dynamic. The Sun, Moon, Earth and other planets are described in terms of their sizes, masses, positions and velocities at any moment in time. The gravitational forces between them are described in terms of mathematical formulae, and from all these, their accelerations (changes in velocity) can be calculated and therefore their later positions. This has now been achieved to a very high degree of accuracy, and systems are in place for calculating planetary positions several thousand years, both in the distant past and in the future. These modern systems are very complex, and as one who has computerised the most up-to-date formulae for deriving planetary positions, I can testify to their complexity – the longitude of the Sun alone contains over a thousand trigonometric expressions. It is these calculations that I have used in my interpretation of the Kālacakra calendar on this website. Basically, given any one planet, from the dynamic information of its position, mass, velocity and the gravitational forces acting on it, we can calculate its future position. It has been recognised by many writers that many of the early astronomical systems in India are derived from Greece, specifically the pre-Ptolemaic system of simple epicycles. These early Greek systems conceived of physical invisible spheres or circles that determined the positions of the planets. In these systems, the planets were considered to move in circles around points that themselves moved in circles around the Earth. The relative radii of these circle made a reasonably good model for the motion of the planets, and based on these, mathematics could be constructed that enabled the calculation of the real, as opposed to mean, motions of the planets. To a first degree of approximation, this can work pretty well. The accuracy that the Greeks achieved was due to a combination of two things. They combined their geometric models of the solar system with the Babylonian sexagesimal (base 60) number system sometime in the 2nd century B.C.E. On this, Glen Van Brummelen writes: "The capacity afforded by efficient numeration transformed their astronomy, from the essentially qualitative model-building science of Eudoxus and Autolycus to the more familiar quantitative one of Hipparchus and Ptolemy. The explanatory models now became capable of predicting positions, not merely mimicking behaviour." Many consider that this was the birth of true science. A model representing an aspect of the universe was constructed from which predictions could be made of planetary positions. The model was then adjusted in the light of observation, and quite reasonable accuracy achieved. These pre-Ptolemaic calculations are the eccentric and epicycle-on-deferent techniques of Hipparchus and Apollonios. For what we would nowadays call the heliocentric component of a planet's motion, the planet is conceived as rotating in a circle, the centre of which is offset from the Sun. This is also exactly equivalent to having a point move around a circle centred on the Sun, and the planet move around this point in a smaller circle. If the centre of this smaller circle rotates once around the Sun every time the planet itself rotates around that point, then the planet describes a circle that is offset from the Sun. (See the diagram and explanation below.) The deferent refers to the simple circle or sphere that is centred on the Sun or Earth and the epicycle is the smaller circle around which the planet moves. With the period of revolution of the deferent being equal to that of the period of the planet, and the epicycle having a period equal to that of the Earth, this model creates the important variation in the apparent speed of the planet, including the retrograde motion when the planet appears to move backwards against the stars. The combination of these two – eccentric and epicycle-on-deferent – gives a good first approximation to the motions of the Sun, Moon and planets. Ptolemy later enhanced these concepts and created a much more elaborate system with many further cycles within cycles, but it is clear that the Kālacakra system uses mathematics that matches closely these pre-Ptolemaic systems – this shall be demonstrated later in this paper – but the Kālacakra contains no reference whatsoever to any such underlying model. There is a model of the world system given in the Kālacakra, but it bears no relationship to the calculations; it cannot be used as the basis for any calculation. Interestingly, this model combines elements that are to be found in both Hindu and Jain systems as well as Buddhist. At the bottom are the disks of the four elements, with earth sitting at the top, and water, fire and wind beneath, each one having a larger diameter than the one above it. In the middle of the 100,000 yojana-diameter disk of earth sits a colossal five-peaked Mt. Meru, circular in cross-section, and 100,000 yojanas in height; it is wider at the top (50,000) than at the bottom (16,000). Meru is surrounded by six alternating sets of continents, oceans, and mountain ranges. First is the circular continent of Candra, then the sweet ocean surrounded by the circular Nīlābha mountains. These are surrounded then by the continent of Sitabha, and so on. The diameter of the outermost Sīta mountains is 50,000 yojanas. This leaves a ring of ground, 25,000 yojanas wide, on which sit the 12 main continents, including our Jambudvīpa, sitting in oceans covering the rest of the upper surface of the disk of the earth. These comprise the seventh major continent. The rivers on these 12 continents flow into these oceans, which in turn flow into the great salty ocean that rises up from the protruding lower disk of the water element; this is the seventh great ocean. Finally, fire rising up from the disk of fire to a level somewhat above the level of the upper surface of the disk of earth forms the seventh great mountain range. I have described this at some length in order to put the following in context: at a level approximately two thirds of the way up Mt. Meru circle the Sun and Moon, in circular orbits that are offset from the centre, that themselves also slowly rotate around Meru. This motion of the Sun around Meru in one day models two natural phenomena; the first being the daily change between day and night. However, in order to make this even close to reasonable, the idea has been introduced that the light from the Sun can only travel a certain distance – otherwise darkness would only exist in the shadow of Meru.
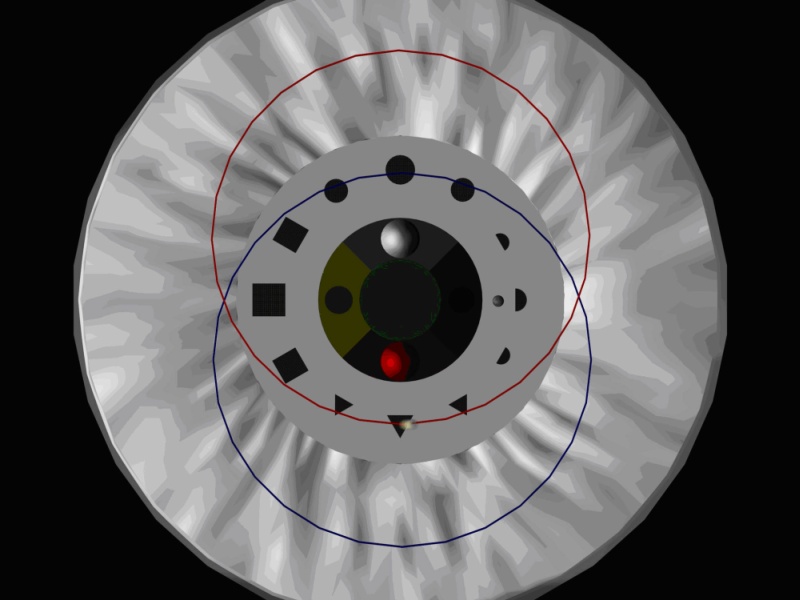
I hope the computer generated image of this above makes the point clear. In this first image the Sun is over the ocean beyond the semi-circular eastern continent of Videha. From the point of view of each continent, Meru is to the north, and so the Sun is well to the south of Videha – it is winter in Videha, and approximately midday. (Notice the Moon behind the Sun in this image.) In the western continent of Godānīya – barely visible on the left – it is midnight during the summer. (Click on this link for an animation illlustrating this.) The second image below shows the orbit of the Sun in two different positions as seen from above. Towards the bottom of the image is our triangular continent of Jambudvīpa. The blue orbit gives winter in Jambudvīpa – when the Sun is at the lowest point in that orbit from the point of view of this image, it is over the ocean, far to the south of Jambudvīpa. When it is in an equivalent position in the red orbit, six months later, the Sun passes overhead of Jambudvīpa, and it is summer. In this way, the orbit is considered to rotate around Mt. Meru, producing the changes of the seasons, and the Sun (together with the Moon) travels around the orbit bringing day and night to the continents. The planets, stars and lunar mansions (rgyu skar, nakṣatra) are not described clearly, but are considered to revolve above and behind the orbit of the Sun. In addition to the problem I described regarding the need to have the Sun's rays only reach a certain distance, there are three other immediate problems with this model. For a start, such a Mt. Meru would be clearly visible in the sky. The Sun and Moon simply go out of sight because of their movement beyond the distance their light can reach, and they do not actually rise and set. Finally, at the moment of full Moon, the Sun and Moon are on opposite sides of Mt. Meru, and so the Moon would be in the shadow of Meru – and as a consequence, invisible. The Moon is hardly invisible at the time of full Moon!
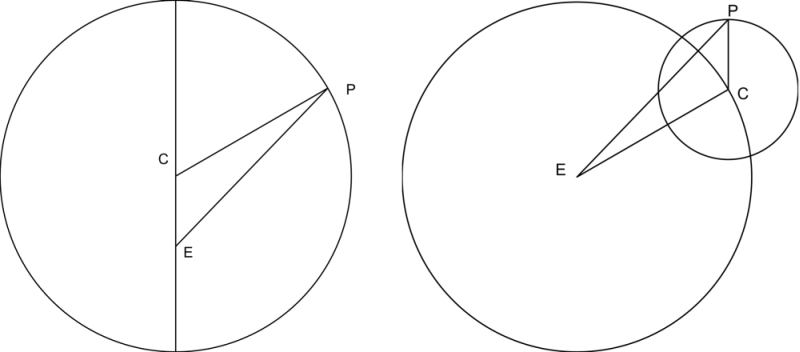
It is easier to see these problems nowadays with modern computer simulations, but this is not a difficult scene to visualise, and there is no reason to assume that the Indian Kalacakra experts took it literally. It seems more likely that embodying the symbolism and the concepts associated with Meru and the continents and fitting in with these long existing traditions was of the greatest importance. This is clearly not a mechanical model. So, the only cosmological model that we have in the Kālacakra system is qualitative, and not suitable as a basis for calculations. There have been many interactions between different societies, but one relevant thread is clear. The Babylonians with their advanced calculation system (derived from the Assyrians) became quite adept at predicting the motion of the planets, based simply on repeated observations over long periods of time. The Greeks took this further by combining these methods of calculation with their concept of models describing the motion of the planets, and basing their mathematics on the geometry of those models. These calculation methods found their way to India, but the notion of the underlying models was not accepted or not considered necessary and did not take hold in Indian systems. Indian astronomers had to fit their inherited calculation systems with the observed motion of the Sun, Moon and planets, and the Hindu astronomers ended up by creating increasingly complex calculation systems as a result. The Buddhist Kālacakra system rejected this approach, accepts the small error in the motion of the Sun, and insists on adjusting the solar longitude simply in the light of observation. It was not considered necessary to construct complex calculations; just make regular adjustments. The relative motion of the Moon was very accurate in the system, and no doubt the planetary calculations seemed similarly satisfactory. It was the Sun that really mattered. The calculations for the five planets as given in the Kālacakra literature can be shown to be derived from the Saura Siddhānta. If one takes the data given for this siddhānta by Varāhamihira (in his Pañcasiddhāntikā) for his epoch of 21st March 505 C.E., and calculates forward to the base Kālacakra epoch of 23rd March 806 C.E., you get the same data as given in the Tantra, including the replication of an error in Varāhamihira's data for Venus. It was mentioned earlier that the Kālacakra system uses mathematics that matches closely pre-Ptolemaic systems. In the illustration above, the eccentric motion of a planet or the Sun is depicted. In the diagram below, on the left, the Earth (E) is offset from the centre (C) of the path of the planet (P). This is the eccentric model. The diagram on the right has the planet revolving in an epicycle around a point (C) that travels around the circular deferent. In this epicycle-on-deferent model, the period of rotation of the point C around the deferent is the same as the period of rotation of the planet about C. This means that the line CP is always pointing in the same direction – upwards in this diagram. This is exactly equivalent to the eccentric model, and the planet will travel in a circle that has its centre offset from the Earth by the same amount.
In the calculations, the first step is to convert from the mean position of the planet or Sun to the eccentric position – for the Sun this is the "true longitude" (nyi ma dag pa) and for a planet its "slow motion" (dal ba dag pa). We can see that the figures used in the Kālacakra literature are taken from an epicycle model by re-creating the basic calculations. All that is needed is to choose suitable radii for the deferent (EC) and epicycle (CP). We then use the cosine and sine rules to determine the angle PEC – this is the angle that has to be added to or subtracted from the mean motion to find the true slow motion. Using the cosine rule to find PE: PE2 = EC2 + CP2 − 2.EC.CP.cos PCE Having determined PE, we can then use the sine rule to find the angle PEC: sin PEC / CP = sin PCE / PE The results of these calculations are shown in the following tables for the five planets and then for the Sun. The first two figures are the values chosen for the radii of the deferent and the epicycle. The first column gives the value in degrees of the angle between the mean planet and the birth-sign. The difference between each is the size of one zodiac sign, 30°. The next column gives the calculated value of PE, and the next is the calculated value, in degrees, of PEC. In the next column, this is converted into the units used in the Kālacakra literature, nāḍī (chu tshod), correct to two decimal places. In the final column are the equivalent figures given in the Kālacakra literature.
In every single case, the calculated values agree closely with those in the Kālacakra system. We can do something similar for the Moon, this time taking steps of 13°.33, the length of a lunar mansion, given that there are 27 lunar mansion in a full circle:
The fit is not quite as good, but I do not know for certain that the originators of these numbers would have used exactly the methods that I am using. The Greeks, for example, used the chord function rather than sine and cosine. Also, the symmetry in the Kālacakra figures cannot be right – the same value 5 for the last row – half a mansion from a half-circle. This has to be wrong. If instead we take 28 mansions in a full circle, we get:
Now the fit is better. This suggests that the Kālacakra figures were derived from a system that had 28, rather than 27, lunar mansions. Here is a perfect example of the kind of error that can occur if a mathematical system is separated from its model. We should perhaps expect to find a similar error in the figures for the fast motion of the planets. Further on the point that the Greeks probably used slightly different calculations, we can take the example of Mars and, instead of calculating PE, use a simplified calculation of just one step, omitting the cosine rule for calculating PE, and using in the sine rule the value EC instead of PE. For a relatively small epicycle, such as with the Sun, this is a reasonable approximation, as EC and PE are of very similar lengths:
We now have a much better fit with the Kālacakra figures, and the numbers are symmetrical about the 90° point, just as are the Kālacakra values. If we do this for all the planets and the Sun, as given above, the results agree with the Kālacakra figures to the nearest whole number in every single case. This suggests that the Greeks, or whoever else calculated these tables, were indeed using more simplified versions of the calculations. These results are probably also closer to those that would be obtained using the old Greek chord tables. I have not yet been able to try repeating such calculations, and this would certainly be an interesting exercise.
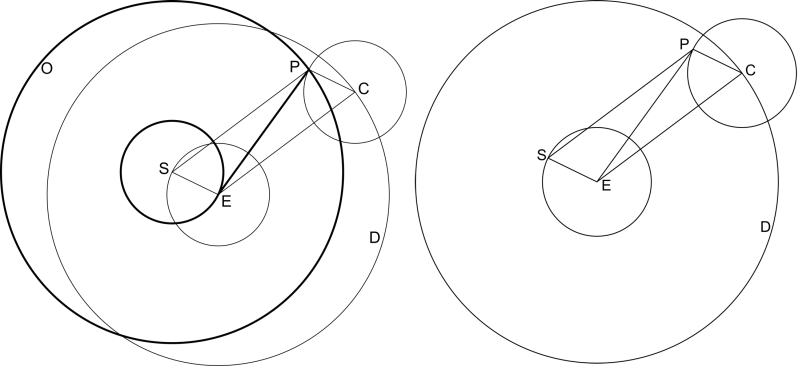
From the point of view of the normal heliocentric system, E revolves around S, and P revolves more slowly (for the outer planets). From the point of view of a geocentric epicycle system, E remains stationary, S revolves around E in an orbit shown as a light line here, and the planet, P, revolves in the epicycle, around the point C. C is the centre of the epicycle, revolving around the deferent. The direction CP is equal to the direction ES, the longitude of the Sun from the Earth. The deferent and epicycle point of view is shown in the diagram on the right. For the inner planets this would represent the apparent motion of the Sun around the Earth as the deferent, and the epicycle as the motion of the planet around the Sun. The geometry is just the same as for the outer planets, but without the inner smaller circle for the orbit of the Sun. For the inner planets, we only consider the triangle PEC. The geometry is very similar to that given above for the Sun, Moon and slow motions of the planets. The angle that needs to be determined in order to calculate the true position of the planet from the Earth, the direction indicated by EP, is the angle PEC. This is the difference between the mean and true positions of the planet. In the right-hand diagram, only these geocentric elements are shown. By the cosine rule: PE2 = CP2 + EC2 − 2.CP.EC.cos (180 − CPS) Having found the length PE, by the sine rule: sin PEC / CP = sin (180 − CPS) / PE As before, the results are shown in the following tables.
The curious last couple of values for Mercury deserve further investigation – there is clearly something wrong. If we take steps assuming a complete circle of 28 rather than 27 lunar mansions, we get:
The fit is now much better, and the last couple of values do not have the large errors as in the previous table. It seems clear that for Mercury, at least, a 28 lunar mansion system was used. However, if we apply a similar calculation for the other planets using 28 mansions, the errors become greater. Mercury appears to be the odd one out here, and the figures for the other planets were calculated using a 27 lunar mansion system. It is this type of work of the Greeks with epicycles that gave birth to the branch of mathematics that we know today as trigonometry. There is no doubt that the calculations that they used will be slightly different to the modern methods used here, and it is for this reason that we should expect small differences between the figures that I have derived and those presented in the Kālacakra literature. However, the principle is clear enough; that the model that underpins the calculation systems given in the Kālacakra literature is an epicycle-on-deferent model, very similar to, if not exactly the same, as that developed by the Greeks, approximately 2,200 years ago. It should be clear that this epicycle-on-deferent model is very different from the Kālacakra cosmological model of Meru, the continents, and so forth. That clearly is of symbolic significance only, and should not in any sense be taken to represent a literal representation of the world system. The calculations that survive in the Kālacakra literature gave a reasonable approximation for the planetary, solar and lunar motions at the time that they were in use in India. But these calculations could not possibly be derived from the Meru-continents model, which we should consider to be qualitative. However, mistakes have been made in this respect, most notably the view held by many Tibetans that the solstice is observed in Tibet two or three weeks (there is more than one system in use) before it is observed in India. This is quite simply wrong, and this view was based on a belief that the layout of the 12 continents and the motion of the Sun relative to them really did match the real world. This mistaken view led directly to the huge errors that we find in the solar longitude in modern Tibetan almanacs. However, there is one reason why it is possible to have some sympathy with the Tibetans here. Although the methods described in the Kālacakra literature can only lead to a tropical zodiac, the difference between the tropical and sidereal zodiacs is not explicitly spelled out. The early Tibetan astronomers were clearly not aware of the distinction, and effectively assumed a sidereal zodiac. Unfortunately, the amount of precession that had occurred during the previous several hundred years meant that the apparent position of the Sun in the lunar mansions of the fixed stars (sidereal zodiac) came in reasonable agreement with their expectations of the solar longitude, given the solstice's supposed early appearance. This clearly reinforced the view that the solstice time difference was real, as is made clear, for example, in the pad dkar zhal lung. As far as I am aware, it was only gzhon nu dpal who did not fall into this trap, because he strictly followed the Kālacakra solar longitude correction method at the time of winter solstice, and seems not to have taken the Meru-continents model as a literal representation of the world system. It may not be possible to trace the exact origin of the values used in the Kālacakra calculations, but if further information does become available, it will be made available on this web site. E. Henning. New Delhi, October, 2009. Last updated 28 January 2013. Return to Home Page. |